Implementing tile encoding in rav1e
25 Apr 2019During the last few months at Videolabs, I added support for tile encoding in rav1e (a Rust AV1 Encoder).
What is this?
AV1 is an open and royalty-free video coding format, concurrent with HEVC (H.265).
Rav1e is an encoder written in Rust, developed by Mozilla/Xiph. As such, it takes an input video and encodes it to produce a valid AV1 bitstream.
Tile encoding
Tile encoding consists in splitting video frames into tiles that can be encoded and decoded independently in parallel (to use several CPUs), at the cost of a small loss in compression efficiency.
This speeds up encoding and increases decoding frame rate.
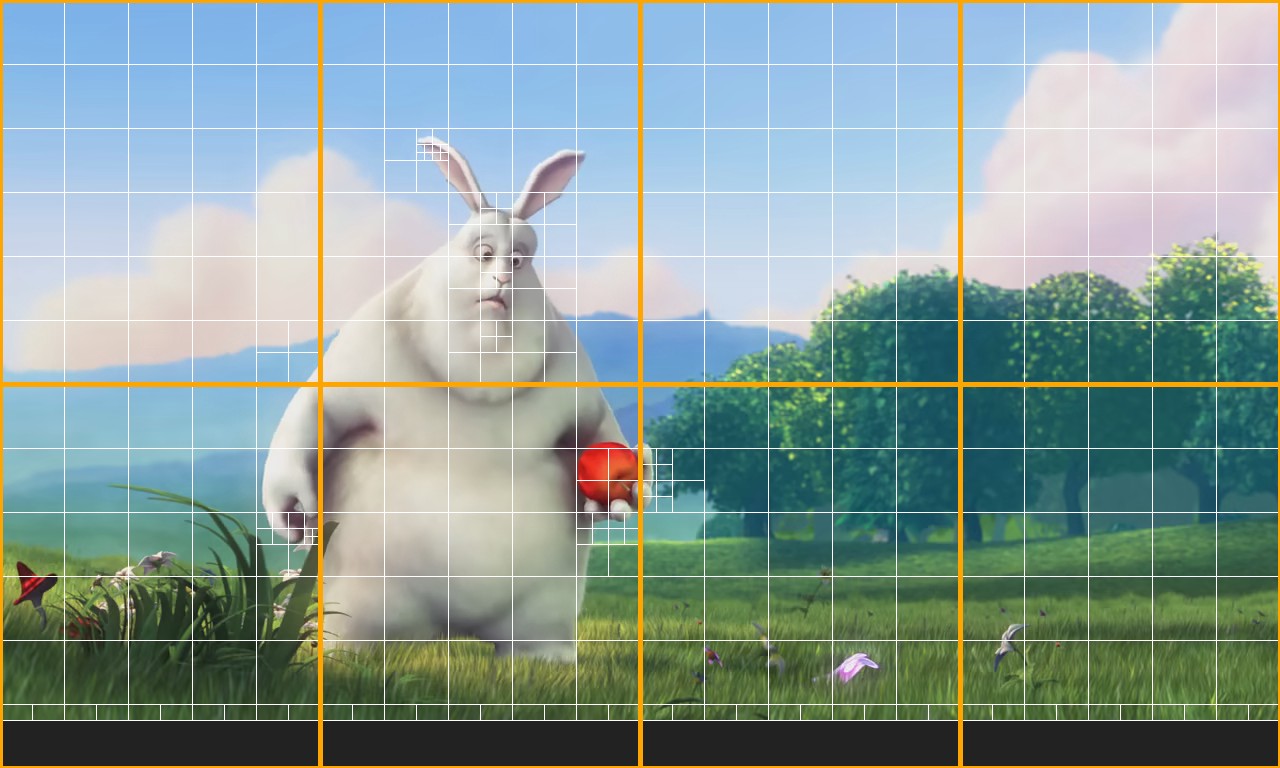
8 tiles (4 colums × 2 rows)
Preliminary work
To prepare for tiling, some refactoring was necessary.
A frame contains 3 planes (one for each YUV component, possibly subsampled). Each plane is stored in a contiguous array, rows after rows.
To illustrate it, here is a mini-plane containing 6×3 pixels. Padding is added for alignment (and other details), so its physical size is 8×4 pixels:
In memory, it is stored in a single array:

The number of array items separating one pixel to the one below is called the stride. Here, the stride is 8.
The encoder often needs to process rectangular regions. For that purpose, many functions received a slice of the plane array and the stride value:
pub fn write_forty_two(slice: &mut [u16], stride: usize) {
for y in 0..2 {
for x in 0..4 {
slice[y * stride + x] = 42;
}
}
}This works fine, but the plane slice spans multiple rows.
Let’s split our planes into 4 tiles (2 columns × 2 rows):
In memory, the resulting plane regions are not contiguous:

In Rust, it is not sufficient not to read/write the same memory from several threads, it must be impossible to write (safe) code that could do it. More precisely, a mutable reference may not alias any other reference to the same memory.
As a consequence, passing a mutable slice (&mut [u16]) spanning multiple
rows is incompatible with tiling. Instead, we need some structure, implemented
with unsafe code, providing a view of the authorized region of the underlying
plane.
As a first step, I replaced every piece of code which used a raw slice and the
stride value by the existing PlaneSlice and PlaneMutSlice
structures (which first required to make planes generic after
improving the Pixel trait).
After these changes, our function could be rewritten as follow:
pub fn write_forty_two<T: Pixel>(slice: &mut PlaneMutSlice<'_, T>) {
for y in 0..2 {
for x in 0..4 {
slice[y][x] = 42;
}
}
}Tiling structures
So now, all the code using a raw slice and a stride value has been replaced. But
if we look at the definition of PlaneMutSlice, we see that it still borrows
the whole plane:
pub struct PlaneMutSlice<'a, T: Pixel> {
pub plane: &'a mut Plane<T>,
pub x: isize,
pub y: isize
}So the refactoring, in itself, does not solves the problem.
What is needed now is a structure that exposes a bounded region of the plane.
Minimal example
For illustration purpose, let’s consider a minimal example, solving a similar problem: split a matrix into columns.

In memory, the matrix is stored in a single array:

To do so, let’s define a ColumnMut type, and split the raw array into columns:
use std::marker::PhantomData;
use std::ops::{Index, IndexMut};
pub struct ColumnMut<'a> {
data: *mut u8,
cols: usize,
rows: usize,
phantom: PhantomData<&'a mut u8>,
}
impl Index<usize> for ColumnMut<'_> {
type Output = u8;
fn index(&self, index: usize) -> &Self::Output {
assert!(index < self.rows);
unsafe { &*self.data.add(index * self.cols) }
}
}
impl IndexMut<usize> for ColumnMut<'_> {
fn index_mut(&mut self, index: usize) -> &mut Self::Output {
assert!(index < self.rows);
unsafe { &mut *self.data.add(index * self.cols) }
}
}
pub fn columns(
slice: &mut [u8],
cols: usize,
) -> impl Iterator<Item = ColumnMut<'_>> {
assert!(slice.len() % cols == 0);
let rows = slice.len() / cols;
(0..cols).map(move |col| ColumnMut {
data: &mut slice[col],
cols,
rows,
phantom: PhantomData,
})
}The PhantomData is necessary to bind the lifetime (in practice,
when we store a raw pointer, we often need a PhantomData).
We implemented Index and IndexMut traits to provide operator []:
// via Index trait
let value = column[y];
// via IndexMut trait
column[y] = value;The iterator returned by columns() yields a different column every time, so
the borrowing rules are respected.
Now, we can read from and write to a matrix via temporary column views:
fn main() {
let mut data = [1, 5, 3, 2,
4, 2, 1, 7,
0, 0, 0, 0];
// for each column, write the sum
columns(&mut data, 4).for_each(|mut col| col[2] = col[0] + col[1]);
assert_eq!(data, [1, 5, 3, 2,
4, 2, 1, 7,
5, 7, 4, 9]);
}Even if the columns are interlaced in memory, from a ColumnMut instance, it is
not possible to access data belonging to another column.
Note that cols and rows fields must be kept private, otherwise they could
be changed from safe code in such a way that breaks boundaries and violates
borrowing rules.
In rav1e
A plane is split in a similar way, except that it provides plane regions instead of colums.
The split is recursive. For example, a Frame contains 3 Planes, so a
Tile contains 3 PlaneRegions, using the same underlying memory.
In practice, more structures related to the encoding state are split into tiles, provided both in const and mut versions, so there is a whole hierarchy of tiling structures:
+- FrameState → TileState
| +- Frame → Tile
| | +- Plane → PlaneRegion
| + RestorationState → TileRestorationState
| | +- RestorationPlane → TileRestorationPlane
| | +- FrameRestorationUnits → TileRestorationUnits
| + FrameMotionVectors → TileMotionVectors
+- FrameBlocks → TileBlocks
The split is done by a separate component (see tiler.rs), which yields a
tile context containing an instance of the hierarchy of tiling views for each
tile.
Relative offsets
A priori, there are mainly two possibilities to express offsets during tile encoding:
- relative to the tile;
- relative to the frame (i.e. absolute).
The usage of tiling views strongly favors the first choice. For example, it would be confusing if a bounded region could not be indexed from 0:
// region starting at (64, 64)
let row = ®ion[0]; // panic, out-of-bounds
let row = ®ion[64]; // ok :-/Worse, this would not be possible at all for the second dimension:
// region starting at (64, 64)
let first_row = ®ion[64];
let first_column = row[64]; // wrong, a raw slice necessarily starts at 0Therefore, offsets used in tiling views are relative to the tile (contrary to libaom and AV1 specification).
Tile encoding
Encoding a frame first involves frame-wise accesses (initialization), then tile-wise accesses (to encode tiles in parallel), then frame-wise accesses using the results of tile-encoding (deblocking, CDEF, loop restoration, …).
All the frame-level structures have been replaced by tiling views where necessary.
The tiling views exist only temporarily, during the calls to
encode_tile(). While they are alive, it is not possible to
access frame-level structures (the borrow checker statically prevents it).
Then the tiling structures vanish, and frame-level processing can continue.
This schema gives an overview:
\
+----------------+ |
| | |
| | | Frame-wise accesses
| | >
| | | - FrameState<T>
| | | - Frame<T>
+----------------+ | - Plane<T>
/ - ...
|| tiling views
\/
\
+---+ +---+ +---+ +---+ |
| | | | | | | | | Tile encoding (possibly in parallel)
+---+ +---+ +---+ +---+ |
|
+---+ +---+ +---+ +---+ | Tile-wise accesses
| | | | | | | | >
+---+ +---+ +---+ +---+ | - TileStateMut<'_, T>
| - TileMut<'_, T>
+---+ +---+ +---+ +---+ | - PlaneRegionMut<'_, T>
| | | | | | | | |
+---+ +---+ +---+ +---+ |
/
|| vanishing of tiling views
\/
\
+----------------+ |
| | |
| | | Frame-wise accesses
| | >
| | | (deblocking, CDEF, ...)
| | |
+----------------+ |
/
Command-line
To enable tile encoding, parameters have been added to pass the (log2) number of
tiles --tile-cols-log2 and --tile-rows-log2. For example, to request 2x2
tiles:
rav1e video.y4m -o video.ivf --tile-cols-log2 1 --tile-rows-log2 1
Currently, we need to pass the log2 of the number of tiles (like in libaom,
even if the aomenc options are called --tile-columns and --tile-rows), to
avoid any confusion. Maybe we could find a better option which is both correct,
non-confusing and user-friendly later.
Bitstream
Now that we can encode tiles, we must write them according to the AV1 bitstream specification, so that decoders can read the resulting file correctly.
Before tile encoding (i.e. with a single tile), rav1e produced a correct bitstream. Several changes were necessary to write multiple tiles.
Tile info
According to Tile info syntax, the frame header signals the number of columns and rows of tiles (it always signaled a single tile before).
In addition, when there are several tiles, it signals two more values, described below.
CDF update
For entropy coding, the encoder maintain and update a CDF (Cumulative Distribution Function), representing the probabilities of symbols.
After a frame is encoded, the current CDF state is saved to be possibly used as a starting state for future frames.
But with tile encoding, each tile finishes with its own CDF state, so which one
should we associate to the reference frame? The answer is: any of them. But we
must signal the one we choose, in context_update_tile_id; the decoder needs it
to decode the bitstream.
In practice, we keep the CDF from the biggest tile.
Size of tiles size
The size of an encoded tile, in bytes, is variable (of course). Therefore, we will need to signal the size of each tile.
To gain a few bytes, the number of bytes used to store the size itself is also
variable, and signaled by 2 bits in the frame header
(tile_size_bytes_minus_1).
Concretely, we must choose the smallest size that is sufficient to encode all the tile sizes for the frame.
Tile group
According to General tile group OBU syntax, we need to signal two values when there are more than 1 tile:
tile_start_and_end_present_flag(we always disable it);tile_size_minus_1.
The tile size (minus 1) is written in little endian, and use the number of bytes we signaled in the frame header.
That’s all. This is sufficient to produce a correct bitstream with multiple tiles.
Parallelization
Thanks to Rayon, parallelizing tile encoding is as easy as replacing
iter_mut() by par_iter_mut().
I tested on my laptop (8 CPUs) several encodings to compare encoding performance (this is not a good benchmark, but it gives an idea, you are encouraged to run your own tests). Here are the results:
tiles time speedup
1 7mn02,336s 1.00×
2 3mn53,578s 1.81×
4 2mn12,995s 3.05×
8* 1mn57,533s 3.59×
Speedups are quite good for 2 and 4 tiles.
*The reason why the speedup is lower than expected for 8 tiles is that my CPU has actually only 4 physical cores. See this reddit comment and this other one.
Limits
Why not 2×, 4× and 8× speedup? Mainly because of Amdahl’s law.
Tile encoding parallelizes only a part of the whole process: there are still single-threaded processings at frame-level.
Suppose that a proportion p (between 0 and 1) of a given task can be
parallelized. Then its theoretical speedup is 1 / ((p/n) + (1-p)), where n
is the number of threads.
tiles speedup speedup speedup
(p=0.9) (p=0.95) (p=0.98)
2 1.82× 1.90× 1.96×
4 3.07× 3.48× 3.77×
8 4.71× 5.93× 7.02×
Maybe counterintuitively, to increase the speedup brought by parallelization, non-parallelized code must be optimized (the more threads are used, the more the non-parallelized code represents a significant part).
The (not-so-reliable) benchmark results for 2 and 4 tiles suggest that tile encoding represents ~90% of the whole encoding process.
Fixing bugs
Not everything worked the first time.
The most common source of errors while implementing tile encoding was related to offsets.
When there was only one tile, all offsets were relative to the frame. With several tiles, some offsets are relative to the current tile, but some others are still relative to the whole frame. For example, during motion estimation, a motion vector can point outside tile boundaries in the reference frame, so we must take care to convert offsets accordingly.
The most obvious errors were catched by plane regions (which prevent access outside boundaries), but some others were more subtle.
Such errors could produce interesting images. For example, here is a screenshot of my first tiled video:
One of these offsets confusions had been quickly catched by barrbrain in intra-prediction. I then fixed a similar problem in inter-prediction.
But the final boss bug was way more sneaky: it corrupted the bitstream (so the decoder was unable to decode), but not always, and never the first frame. When an inter-frame could be decoded, it was sometimes visually corrupted, but only for some videos and for some encoding parameters.
After more than one week of investigations, I finally found it.
\o/
Conclusion
Implementing this feature was an awesome journey. I learned a lot, both about Rust and video encoding (I didn’t even know what a tile was before I started).
Big thanks to the Mozilla/Xiph/Daala team, who has been very welcoming and helpful, and who does amazing work!
Discuss on r/programming, r/rust, r/AV1 and Hacker News.